
Kaamera mooduli põhistruktuur
I. Kaamera ehitus ja tööpõhimõte
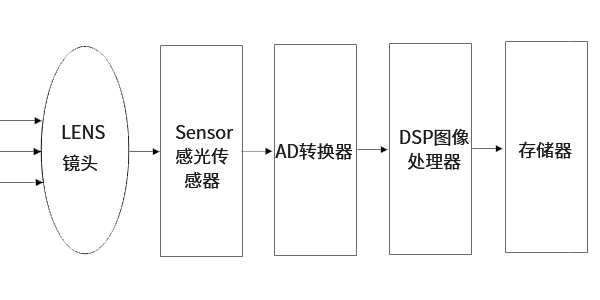
Stseen pildistatakse läbi objektiivi, genereeritud optiline pilt projitseeritakse andurile ja seejärel muudetakse optiline pilt elektrisignaaliks, mis muundatakse analoog-digitaalmuundamise teel digitaalseks signaaliks.Digitaalne signaal töödeldakse DSP-ga ja saadetakse seejärel töötlemiseks arvutisse ning teisendatakse lõpuks pildiks, mida saab näha telefoni ekraanil.
Digitaalse signaalitöötluse (DSP) kiibi funktsioon: optimeerige digitaalse kujutise signaali parameetreid keerukate matemaatiliste algoritmide seeria abil ning edastage töödeldud signaalid arvutitesse ja muudesse seadmetesse USB ja muude liideste kaudu.DSP struktuuri raam:
1、 ISP (pildisignaali protsessor)
1. ISP (pildisignaaliprotsessor)
2, JPEG-kooder
2. JPEG-kooder
3、 USB-seadme kontroller
3. USB-seadme kontroller
Levinud kaameraandureid on kahte tüüpi,
Üks neist on CCD (Chagre Couled Device) andur, st laenguga ühendatud seade.
Teine on CMOS (täiendav metalloksiidpooljuht) andur, st komplementaarne metalloksiidi pooljuht.
CCD eelis seisneb heas pildikvaliteedis, kuid tootmisprotsess on keeruline, hind on kõrge ja energiatarve suur.Sama resolutsiooniga on CMOS odavam kui CCD, kuid pildikvaliteet on madalam kui CCD.Võrreldes CCD-ga on CMOS-pildianduril väiksem energiatarve.Lisaks on protsessitehnoloogia edenedes pidevalt paranenud ka CMOS-i pildikvaliteet.Seetõttu kasutavad praegused turul olevad mobiiltelefonide kaamerad kõik CMOS-andureid.
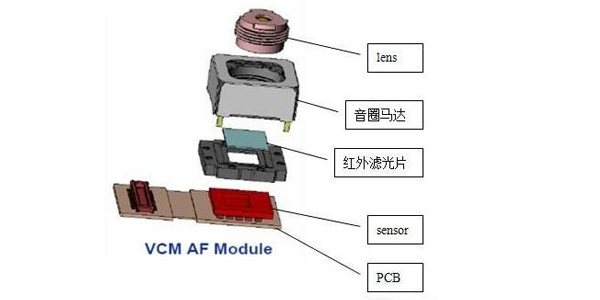
Mobiiltelefoni kaamera lihtne struktuur
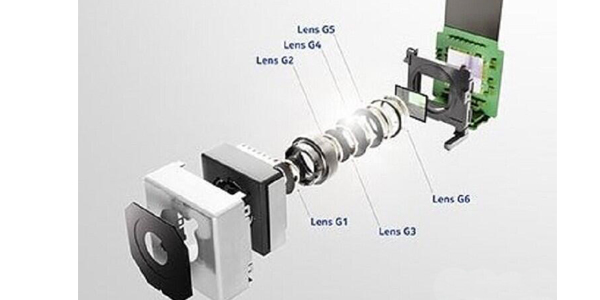
Objektiiv: koguge valgust ja projitseerige stseen pildikandja pinnale.
Pildisensor: pildikandja, mis muudab objektiivi pinnale projitseeritud kujutise (valgussignaali) elektriliseks signaaliks.
Mootor: juhib objektiivi liikumist, nii et objektiiv projitseerib kujutise andmekandja pinnale selge pildi.
Värvifilter: inimsilma poolt nähtav stseen asub nähtava valguse ribas ja pildisensor tunneb valgusriba paremini ära kui inimsilm.Seetõttu lisatakse üleliigse valgusriba välja filtreerimiseks värvifilter, et pildisensor saaks jäädvustada tegelikke silmadega nähtud stseene.
Mootori ajami kiip: kasutatakse mootori liikumise juhtimiseks ja objektiivi juhtimiseks automaatse teravustamise saavutamiseks.
Trükkplaadi substraat: edastage pildianduri elektriline signaal tagaküljele.
II.Seotud parameetrid ja nimisõnad
1. Levinud pildivormingud
1.1 RGB-vorming:
Traditsiooniline punane, roheline ja sinine formaat, näiteks RGB565 ja RGB888;16-bitine andmevorming on 5-bitine R + 6-bitine G + 5-bitine B. G-l on veel üks bitt, kuna inimese silmad on rohelise suhtes tundlikumad.
1.2 YUV-vorming:
Luma (Y) + chroma (UV) formaat.YUV viitab pikslivormingule, milles heleduse parameeter ja värvuse parameeter väljendatakse eraldi.Selle eraldamise eeliseks on see, et see mitte ainult ei väldi vastastikuseid häireid, vaid vähendab ka värvide diskreetimissagedust, ilma et see mõjutaks liiga palju pildikvaliteeti.YUV on üldisem termin.Spetsiifilise paigutuse jaoks saab selle jagada mitmeks konkreetseks vorminguks.
Chroma (UV) määratleb värvi kaks aspekti: toon ja küllastus, mida tähistavad vastavalt CB ja CR.Nende hulgas peegeldab Cr erinevust RGB sisendsignaali punase osa ja RGB signaali heleduse väärtuse vahel, Cb aga RGB sisendsignaali sinise osa ja RGB signaali heleduse väärtuse erinevust.
Peamised proovivõtuvormingud on YCbCr 4:2:0, YCbCr 4:2:2, YCbCr 4:1:1 ja YCbCr 4:4:4.
1.3 RAW andmevorming:
RAW-pilt on toorandmed, mille CMOS- või CCD-pildiandur teisendab jäädvustatud valgusallika signaali digitaalseks signaaliks.RAW-fail on fail, mis salvestab digikaamera anduri algse teabe ja mõned kaamera loodud metaandmed (nt ISO-sätted, säriaega, ava väärtus, valge tasakaal jne).RAW on töötlemata ja tihendamata vorming ning seda võib käsitada kui "toores kujutise kodeeritud andmeid" või eredamalt "digitaalseks negatiiviks".Anduri iga piksel vastab värvifiltrile ja filtrid jaotatakse Bayeri mustri järgi.Iga piksli andmed väljastatakse otse, nimelt RAW RGB andmed
Toorandmed (Raw RGB) muutuvad pärast värvide interpoleerimist RGB-ks.
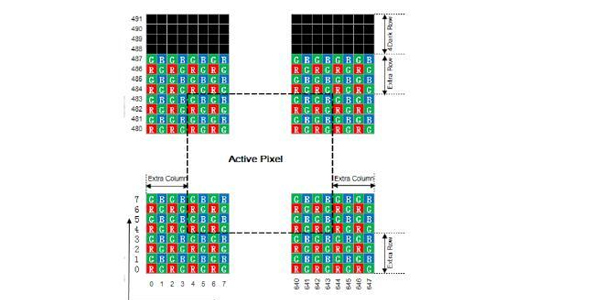
RAW-vormingus pildi näide
2. Seotud tehnilised näitajad
2.1 Pildi eraldusvõime:
SXGA (1280 x 1024), 1,3 megapikslit
XGA (1024 x 768), 0,8 megapikslit
SVGA (800 x 600), 0,5 megapikslit
VGA (640x480), 0,3 megapikslit (0,35 megapikslit viitab 648x488)
CIF (352x288), 0,1 megapikslit
SIF/QVGA (320x240)
QCIF (176 x 144)
QSIF/QQVGA (160x120)
2.2 Värvisügavus (värvibittide arv):
256 värvi halli skaala, 256 halli liiki (sh must ja valge).
15- või 16-bitine värv (kõrge värv): 65 536 värvi.
24-bitine värv (tõeline värv): igal põhivärvil on 256 taset ja nende kombinatsioonis on 256 * 256 * 256 värvi.
32-bitine värv: lisaks 24-bitisele värvile kasutatakse 8 täiendavat bitti kattuva kihi (alfakanali) graafiliste andmete salvestamiseks.
2.3 Optiline suum ja digitaalne suum:
Optiline suum: suurendage/vähendage objekti, mida soovite pildistada, reguleerides objektiivi.See hoiab pikslid ja pildikvaliteedi põhimõtteliselt muutumatuna, kuid saate teha ideaalse pildi.Digitaalne suum: suumi tegelikult pole.See lihtsalt võtab algsest pildist ja suumib sisse. LCD-ekraanil kuvatavat on suurendatud, kuid pildikvaliteet ei ole oluliselt paranenud ja pikslite arv on väiksem kui maksimaalne pikslite arv, mida teie kaamera suudab pildistada.Pildikvaliteet on põhimõtteliselt vääritu, kuid see võib pakkuda mõningast mugavust.
2.4 Pildi tihendamise meetod:
JPEG/M-JPEG
H.261/H.263
MPEG
H.264
2.5 Pildi müra:
See viitab pildi mürale ja häiretele ning kuvatakse pildil fikseeritud värvimürana.
2.6 Automaatne valge tasakaal:
Lihtsamalt öeldes: valgete objektide taastamine kaamera abil.Seotud mõisted: värvitemperatuur.
2.7 Vaatenurk:
Sellel on sama põhimõte nagu inimsilma pildistamisel, mida nimetatakse ka pildistamisvahemikuks.
2.8 Autofookus:
Automaatse teravustamise saab jagada kahte kategooriasse: üks on automaatne teravustamine objektiivi ja objekti vahelise kauguse alusel ning teine on teravustamise tuvastamise autofookus, mis põhineb teravustamisekraanil oleval selgel kujutisel (teravusalgoritm).
Märkus. Suumimine on mõeldud kaugemate objektide lähendamiseks.Keskendutakse pildi selgeks muutmisele.
2.9 Automaatne säritus ja gamma:
See on ava ja katiku kombinatsioon.Ava, säriaeg, ISO.Gamma on inimsilma reageerimiskõver heledusele.
III.Muu kaamera struktuur

3.1 Fikseeritud fookusega kaamera struktuur
3.2 Optilise pildistabilisaatori kaamera struktuur

3.3 MEMS kaamera
Postitusaeg: 28. mai-2021




